Optimizing Global Injectivity for Constrained Parameterization
Abstract
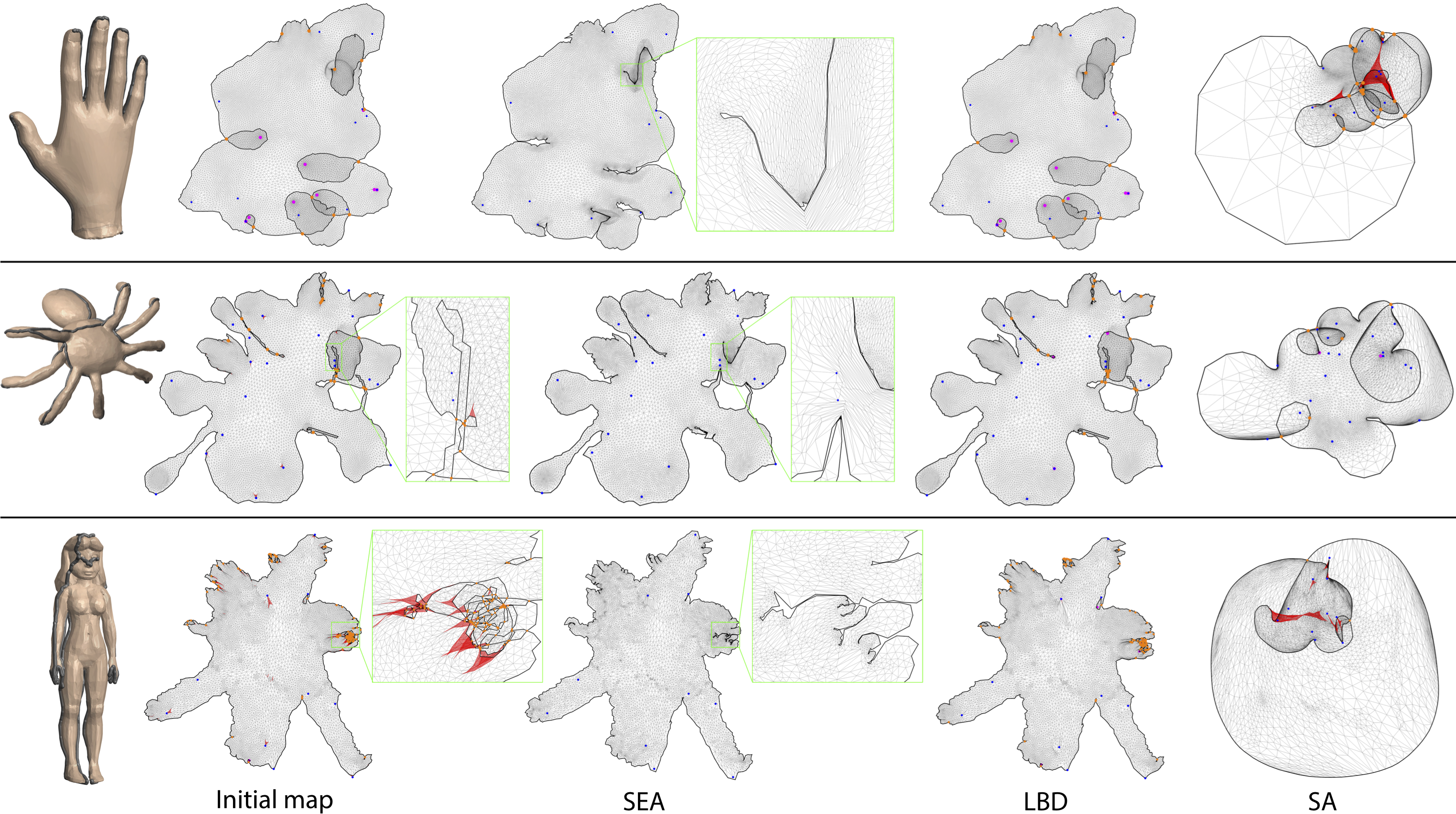
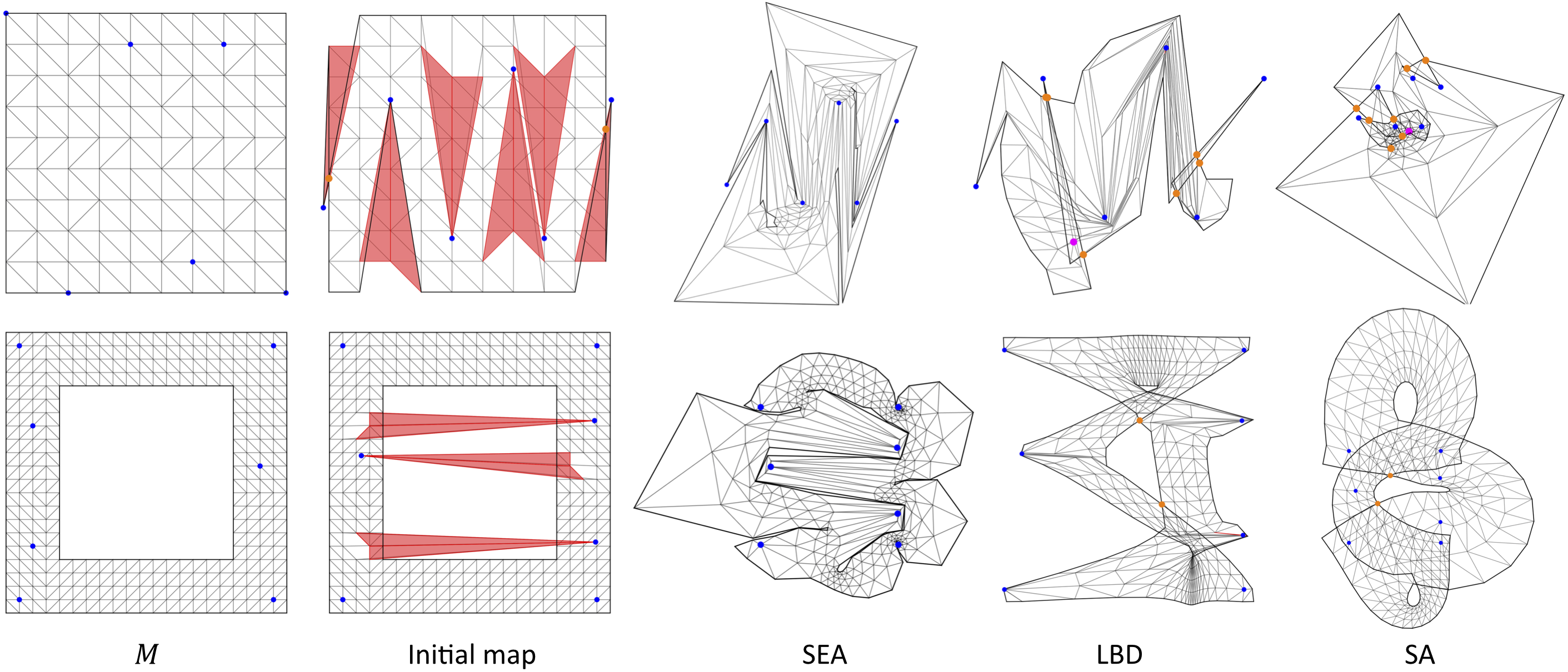
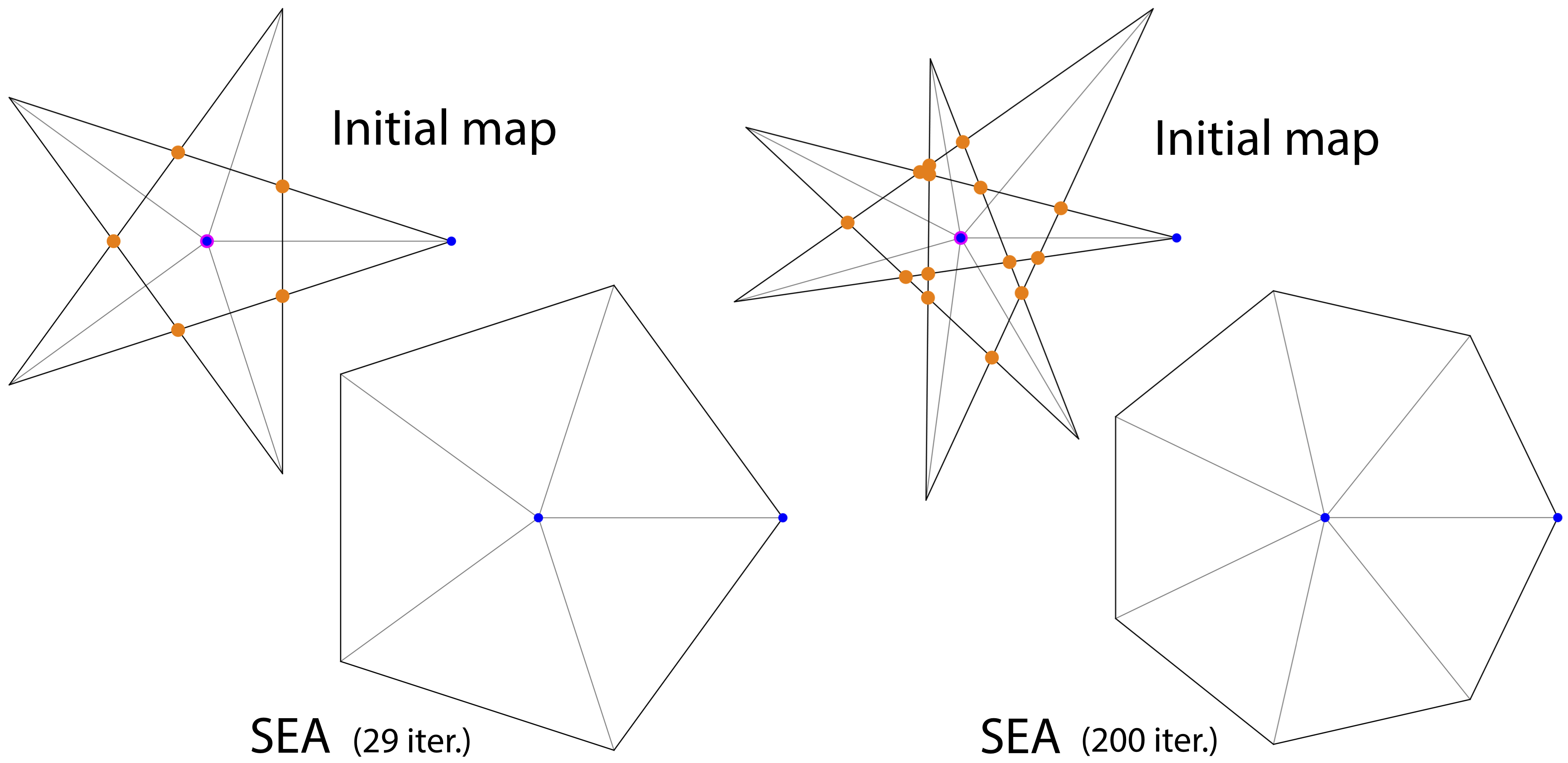
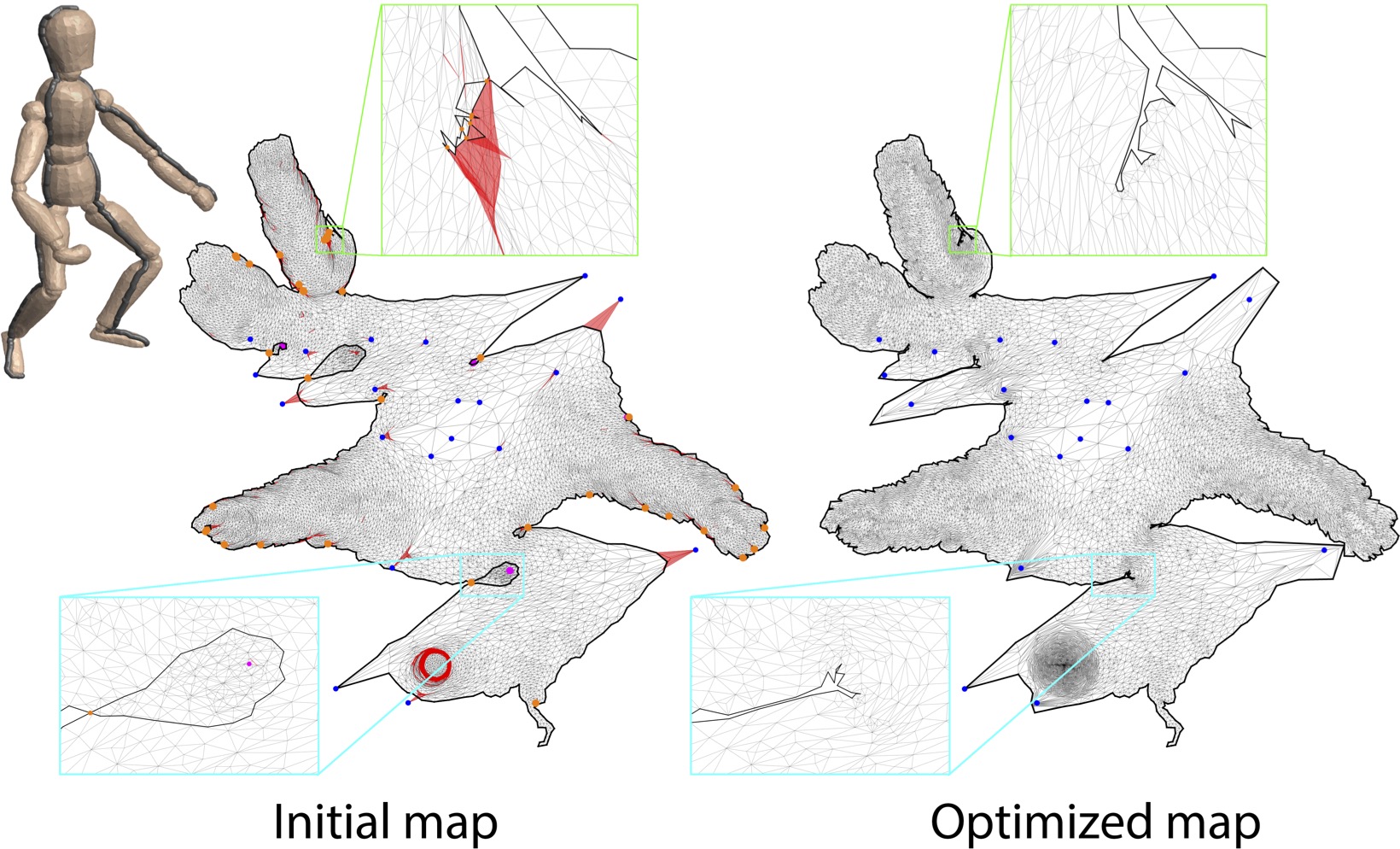
Injective parameterizations of triangulated meshes are critical across applications but remain challenging to compute. Existing algorithms to find injectivity either require initialization from an injective starting state, which is currently only possible without positional constraints, or else can only prevent triangle inversion, which is insufficient to ensure injectivity. Here we present, to our knowledge, the first algorithm for recovering a globally injective parameterization from an arbitrary non-injective initial mesh subject to stationary constraints. These initial meshes can be inverted, wound about interior vertices and/or overlapping. Our algorithm in turn enables globally injective mapping for meshes with arbitrary positional constraints. Our key contribution is a new energy, called smooth excess area (SEA), that measures non-injectivity in a map. This energy is well-defined across both injective and non-injective maps and is smooth almost everywhere, making it readily minimizable using standard gradient-based solvers starting from a non-injective initial state. Importantly, we show that maps minimizing SEA are guaranteed to be locally injective and almost globally injective, in the sense that the overlapping area can be made arbitrarily small. Analyzing SEA’s behavior over a new benchmark set designed to test injective mapping, we find that optimizing SEA successfully recovers globally injective maps for 85% of the benchmark and obtains locally injective maps for 90%. In contrast, state-of-the-art methods for removing triangle inversion obtain locally injective maps for less than 6% of the benchmark, and achieve global injectivity (largely by chance as prior methods are not designed to recover it) on less than 4%.
Video
Fast Forward
Summary
Presentation
Optimization Process
The process of optimizing SEA (smooth excess area) on the examples presented in the paper.
Dataset
We create a benchmark dataset for evaluating various methods’ capability to recover an injective mapping from a non-injective initial mapping while keeping a group of positional constraints in place.
The dataset includes 1791 triangular mesh examples. Each example contains
input.obj: rest mesh and initial mesh (as UV coordinates)handles.txt: list of indices of the fixed verticesgroundTruth.obj: globally injective mesh satisfying positional constraints
We also provide the result of our method for each example.
Code
Source code is hosted on github.
Figures